3D has always fascinated me and so when I found out that stereo existed I really wanted to see it happening in real time.Unfortunately most state of the art methods such as graph based or belief propagation I found online were too slow for my needs.I tried using various methods for speeding it up including segmentation based approaches however they were still too slow for my real time needs of at around 30 FPS. I settled for trying to implement stereo using a Dynamic Programming Approach and since the process it parallel it made an excellent candidate for CUDA Acceleration.
Features:
- Utilizes the GPU Based Image Processing Library to achieve massive parallel speed ups
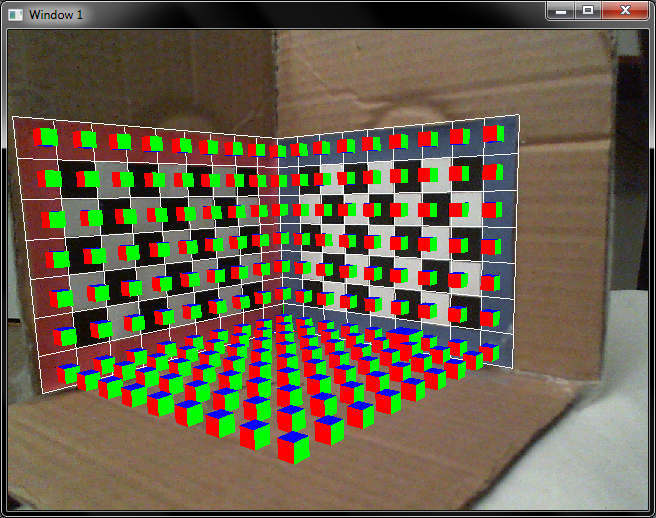
- Features own 3D Calibration setup for rectifying images
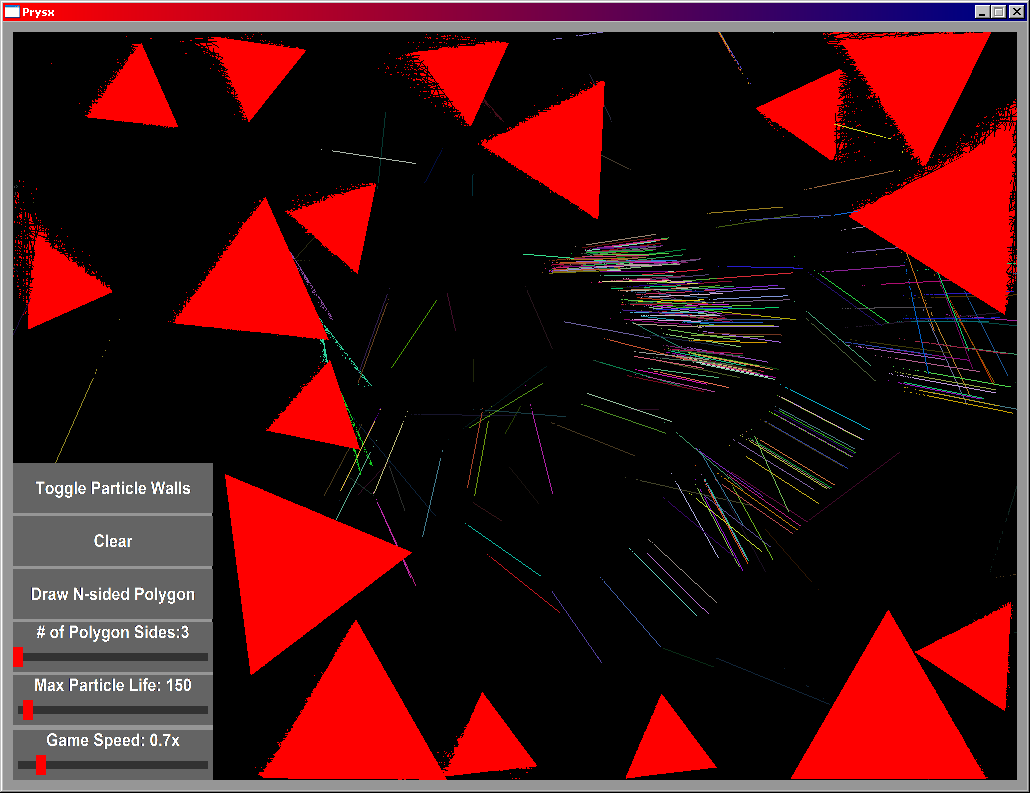
The following video is the Stereo Matching demo:
The following picture demonstrates the 3D Calibration: